
Last Updated on Mai 6, 2024 10:26 am by Laszlo Szabo / NowadAIs | Published on Mai 6, 2024 by Laszlo Szabo / NowadAIs
Was Sie nicht tun können: Roboter balanciert auf einer Kugel mit Nvidias DrEureka Sim-to-Real-Modell – Wichtige Hinweise
- Nvidias DrEureka Einführung: Ein innovatives System von Nvidia, das große Sprachmodelle verwendet, um den Sim-to-Real-Designprozess in der Robotik zu rationalisieren.
- Automatisierung von Belohnungsfunktionen: DrEureka automatisiert die Erstellung von Belohnungsfunktionen und Domänen-Randomisierungsparametern für eine nahtlose Anwendung in der realen Welt.
- Erprobung und Validierung: Erfolgreiche Anwendung bei komplexen Roboteraufgaben wie vierbeiniger Fortbewegung und geschickter Manipulation, die eine robuste Leistung zeigen.
- Verbesserte Sicherheitsfunktionen: Integration von Sicherheitsanweisungen in das Reward-Design, wodurch die Sicherheit und Effektivität von Roboteroperationen in der Praxis verbessert wird.
- Zukünftige Verbesserungen und Potenziale: Es wird die Notwendigkeit anerkannt, Feedback aus der realen Welt und zusätzliche sensorische Inputs einzubeziehen, um die Übertragung von der Simulation in die Realität zu verfeinern.
Einführung – Nvidias DrEureka Sim-to-Real-Modell
In der sich schnell entwickelnden Welt der Robotik stellt die Überbrückung der Kluft zwischen Simulation und realer Leistung seit langem eine große Hürde dar. Herkömmliche Ansätze für den Transfer von der Simulation in die Realität beruhten oft auf der sorgfältigen manuellen Abstimmung von Reward-Funktionen und Simulationsparametern – ein zeit- und arbeitsintensiver Prozess. Aus den Forschungslabors von Nvidia ist jedoch eine neue Lösung hervorgegangen , die als DrEureka bekannt ist.
DrEureka ist ein innovatives System, das die Leistungsfähigkeit großer Sprachmodelle (LLMs) nutzt, um den Sim-to-Real-Designprozess zu automatisieren und zu beschleunigen. Durch die Nutzung des angeborenen Verständnisses physikalischer Konzepte innerhalb fortschrittlicher LLMs ist DrEureka in der Lage, maßgeschneiderte Belohnungsfunktionen und Parameter für die Domänenrandomisierung zu generieren, was eine nahtlose Übertragung der in der Simulation erlernten Richtlinien auf die reale Welt ermöglicht.
Im Folgenden gehen wir auf das Innenleben von DrEureka ein und untersuchen seine Schlüsselkomponenten, die Experimente, die seine Fähigkeiten bestätigt haben, und die tiefgreifenden Auswirkungen auf die Zukunft der autonomen Robotik.

Überbrückung der Kluft zwischen Simulation und Realität: Die Herausforderung
Bisher war die Übertragung von in der Simulation erlernten Strategien auf die reale Welt eine komplexe und mühsame Aufgabe. Robotersysteme, die ausschließlich in virtuellen Umgebungen trainiert wurden, haben oft Schwierigkeiten, ihre Leistung aufrechtzuerhalten, wenn sie in der realen Welt eingesetzt werden, ein Phänomen, das als Lücke zwischen Simulation und Realität bekannt ist.
Diese Diskrepanz entsteht durch die inhärenten Unterschiede zwischen der simulierten und der realen Umgebung. Simulationsumgebungen sind zwar für ein effizientes Training optimiert, können aber die Nuancen und Komplexitäten der realen Welt nicht genau wiedergeben. Faktoren wie Reibung, Dämpfung, Steifigkeit und Schwerkraft lassen sich nur schwer mit perfekter Präzision modellieren, was zu Diskrepanzen zwischen dem simulierten und dem tatsächlichen Verhalten des Roboters führt.
Um die Diskrepanz zwischen Simulation und Realität zu überwinden, haben sich die Forscher traditionell auf die manuelle Entwicklung und Abstimmung der Belohnungsfunktion für die Aufgabe sowie der physikalischen Parameter der Simulation verlassen. Dieser Prozess erfordert ein tiefes Verständnis der Robotik, der Physik und der jeweiligen Aufgabe, was ihn zu einem zeit- und arbeitsintensiven Unterfangen macht. Infolgedessen wurde die Entwicklung robuster und zuverlässiger Robotersysteme behindert, was die breite Einführung autonomer Technologien einschränkt.
Nvidias Eureka: Der Vorläufer von DrEureka
Vor der Einführung von DrEureka hatte Nvidia mit der Einführung seiner Eureka-Plattform bereits bedeutende Fortschritte bei der Bewältigung der Simulations-Realitäts-Herausforderung gemacht. Eureka ist ein Algorithmus für das Belohnungsdesign auf menschlicher Ebene, der den Prozess der Erstellung von Belohnungsfunktionen für Roboteraufgaben automatisiert.
Die Eureka-Plattform nimmt die Aufgaben- und Sicherheitsanweisungen sowie den Quellcode der Umgebung auf und generiert eine standardisierte Belohnungsfunktion und -richtlinie. Diese werden dann unter verschiedenen Simulationsbedingungen getestet, um einen Physik-Prior zu entwickeln, der auf Belohnungen reagiert. Dieser belohnungsabhängige Physik-Prior dient als wichtige Grundlage für die nachfolgenden Schritte im DrEureka-Arbeitsablauf.
Die Fähigkeit von Eureka, maßgeschneiderte Reward-Funktionen zu generieren, stellt einen bedeutenden Fortschritt im Bereich des Simulations-Realitäts-Transfers dar, da die Notwendigkeit der manuellen, zeitaufwändigen Entwicklung von Reward-Funktionen entfällt. Allerdings war die Eureka-Plattform immer noch auf die von Menschen entworfenen Parameter der Domänenrandomisierung (DR) angewiesen, um die Lücke zwischen Simulation und Realität zu schließen.
DrEureka: Nutzung der Leistungsfähigkeit von Sprachmodellen
Die Schlüsselinnovation hinter DrEureka liegt in der Fähigkeit, das umfangreiche physikalische Wissen, das in hochmodernen LLMs eingebettet ist, nutzbar zu machen. Diese fortschrittlichen Sprachmodelle, wie z. B. GPT-4, verfügen über ein tiefes Verständnis von Konzepten wie Reibung, Dämpfung, Steifigkeit, Schwerkraft und anderen grundlegenden physikalischen Prinzipien. Durch die Nutzung dieses angeborenen Wissens ist DrEureka in der Lage, hocheffektive Parameter für die Domänenrandomisierung zu generieren, die die Kluft zwischen Simulation und Realität überbrücken.
Der DrEureka-Arbeitsablauf beginnt mit der Übernahme der Aufgaben- und Sicherheitsanweisungen zusammen mit dem Umgebungsquellcode und der Einleitung des Eureka-Reward-Generierungsprozesses. Eureka erzeugt eine standardisierte Reward-Funktion und -Richtlinie, die dann unter verschiedenen Simulationsbedingungen getestet werden, um einen Reward-aware Physik-Prior zu entwickeln.
Anschließend nutzt die LLM-gestützte DrEureka-Komponente diesen Physik-Prior, um eine Reihe von Domänen-Randomisierungsparametern zu erzeugen, die auf die spezifische Aufgabe und Umgebung zugeschnitten sind. Durch die Synthese der von Eureka generierten Belohnungsfunktion und der von LLM erstellten Domänen-Randomisierungsparameter ist DrEureka in der Lage, Richtlinien zu trainieren, die für den Einsatz in der realen Welt optimiert sind.
Experimentelle Validierung: Vierfüßige Fortbewegung und geschickte Manipulation
Um die Fähigkeiten von DrEureka zu validieren, führte das Forschungsteam eine Reihe von Experimenten mit verschiedenen Roboteraufgaben durch, um die Fähigkeit des Systems zu demonstrieren, die Lücke zwischen Simulation und Realität zu schließen.
Vierfüßige Fortbewegung
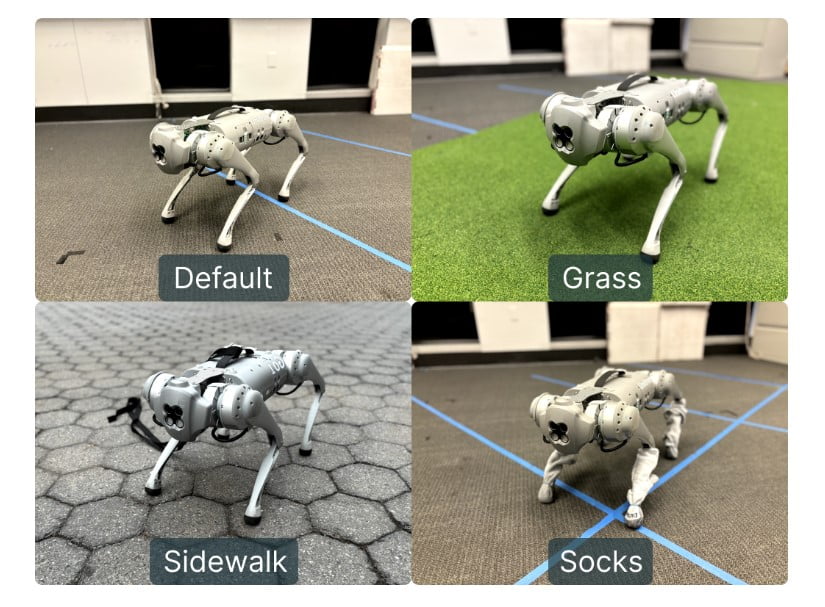
Eine der wichtigsten Aufgaben war die vierbeinige Fortbewegung, bei der die Forscher einen Roboterhund darauf trainierten, durch verschiedene reale Terrains zu navigieren. Die von DrEureka generierten Richtlinien erwiesen sich als bemerkenswert robust und übertrafen diejenigen, die mit manuell entworfenen Belohnungs- und Domänenrandomisierungskonfigurationen trainiert wurden.
Interessanterweise fanden die Forscher heraus, dass das LLM-gesteuerte DrEureka nicht nur in der Lage war, die Leistung der von Menschen entworfenen Richtlinien zu erreichen, sondern auch neuartige Aufgaben zu lösen, wie z. B. das Balancieren von Vierbeinern und das Laufen auf einem Yogaball, ohne dass ein iteratives manuelles Design erforderlich war.
Geschickte Manipulation
Zusätzlich zur vierbeinigen Fortbewegung untersuchten die Forscher auch die Fähigkeiten von DrEureka im Bereich der geschickten Manipulation. Das System sollte einem Roboter komplexe Würfelrotationsmanöver beibringen – eine Herausforderung, die normalerweise eine sorgfältige Simulationsabstimmung erfordert.
Wieder einmal stellten die von DrEureka generierten Richtlinien ihre Anpassungsfähigkeit unter Beweis und übertrugen die erlernten Fähigkeiten nahtlos von der simulierten Umgebung auf die reale Welt. Die Forscher waren beeindruckt von der Fähigkeit des Systems, mit Störungen und Unsicherheiten in der realen Welt umzugehen und die Leistung unter verschiedenen Testbedingungen konstant zu halten.
Verbesserung von Sicherheit und Robustheit: Die Rolle des LLM-gesteuerten Belohnungsdesigns
Ein entscheidender Aspekt des DrEureka-Systems ist seine Fähigkeit, Sicherheitsaspekte in den Belohnungsdesignprozess einzubeziehen. Durch die Erweiterung der Eureka-Belohnungsgenerierungs-Subroutine mit Sicherheitsanweisungen stellten die Forscher sicher, dass die resultierenden Belohnungsfunktionen nicht nur auf die Aufgabenerfüllung, sondern auch auf den sicheren Einsatz in der realen Welt zugeschnitten sind.
Dieser sicherheitsbewusste Ansatz ist besonders wichtig, wenn es um komplexe Robotersysteme geht, die in unstrukturierten Umgebungen arbeiten. Das LLM-gesteuerte Belohnungsdesign innerhalb von DrEureka ermöglicht die Erstellung von Richtlinien, die sowohl die Aufgabenerfüllung als auch die Erhaltung der Integrität des Roboters und die Sicherheit seiner Umgebung priorisieren.
Die Grenzen verschieben: Zukünftige Richtungen und Beschränkungen
Obwohl die derzeitige Implementierung von DrEureka beeindruckende Fähigkeiten gezeigt hat, räumen die Forscher ein, dass es noch Möglichkeiten für weitere Verbesserungen und Erkundungen gibt.
Eine mögliche Verbesserung ist die Integration von Feedback aus der realen Ausführung in die LLM-Trainingsschleife. Durch die Verwendung von Daten aus realen Ausführungsfehlern als zusätzlichen Input könnten die LLMs den Simulations-zu-Real-Transferprozess in aufeinanderfolgenden Iterationen möglicherweise noch effektiver abstimmen.
Darüber hinaus stellen die Forscher fest, dass sich alle Aufgaben und Strategien in der Studie ausschließlich auf die propriozeptiven Eingaben des Roboters stützten, ohne Vision oder andere Sensormodalitäten einzubeziehen. Die Integration dieser zusätzlichen sensorischen Eingaben könnte die Leistung der Strategien weiter verbessern und die Rückkopplungsschleife des LLM bereichern, was zu noch robusteren und anpassungsfähigeren Robotersystemen führen würde.
Wie bei jeder neuen Technologie gibt es auch bei DrEureka gewisse Einschränkungen. Die Forscher räumen ein, dass es immer wieder vorkommt, dass der Roboter vom Yogaball fällt oder auf andere Herausforderungen in der realen Welt stößt.
Schlussfolgerung
DrEureka von Nvidia stellt einen bahnbrechenden Fortschritt auf dem Gebiet des Transfers von Simulation zu Realität für die autonome Robotik dar. Durch die Nutzung großer Sprachmodelle haben die Forscher ein umfassendes System entwickelt, das den gesamten Prozess automatisiert, vom anfänglichen Erwerb von Fähigkeiten bis hin zur Implementierung in der realen Welt. Den vollständigen Forschungsbericht können Sie hier lesen.
Die experimentellen Ergebnisse zeigen die bemerkenswerte Robustheit und Anpassungsfähigkeit der von DrEureka generierten Richtlinien, die diejenigen übertreffen, die mit traditionellen, manuellen Methoden trainiert wurden. Die Fähigkeit des Systems, nicht nur die Leistung der von Menschen entworfenen Richtlinien zu erreichen, sondern auch neue Aufgaben ohne iteratives Design zu lösen, ist ein Beweis für das transformative Potenzial dieser Technologie.
Die Zukunft der autonomen Robotik ist sehr vielversprechend, da sich die Fähigkeiten von Sprachmodellen ständig weiterentwickeln. DrEurekas nahtlose Integration von physikalischem Verständnis, aufgabenspezifischem Belohnungsdesign und adaptiver Domänenrandomisierung ebnet den Weg für eine neue Ära intelligenter, anpassungsfähiger und reaktionsschneller Robotersysteme.
Die Auswirkungen dieser Technologie gehen weit über die Grenzen von Forschungslabors hinaus, da Branchen in verschiedenen Sektoren von den Fortschritten bei der Übertragung von Simulationen in die Realität profitieren werden. Von der Fertigung über die Logistik bis hin zum Gesundheitswesen und der Katastrophenhilfe – die Vielseitigkeit der von DrEureka betriebenen Roboter könnte neue Grenzen der Automatisierung eröffnen und die Art und Weise, wie wir mit der physischen Welt interagieren, verändern.
Definitionen
- Nvidia: Ein Technologieunternehmen, das für seine leistungsstarken Grafikprozessoren und seine Pionierarbeit in den Bereichen künstliche Intelligenz und Deep-Learning-Technologien bekannt ist.
- DrEureka: Ein von Nvidia entwickeltes System, das KI einsetzt, um die Lücke zwischen Simulation und Realität in der Robotik zu schließen, indem es die Übertragung von simulierten Robotikaufgaben auf reale Anwendungen verbessert.
- Lücke zwischen Simulation und Realität: Die Diskrepanz zwischen der Ausführung von Aufgaben durch Roboter in simulierten Umgebungen und in der realen Welt.
- Domänen-Randomisierungsparameter (DR): Variablen und Einstellungen, die in Simulationsumgebungen angepasst werden, damit Modelle besser verallgemeinert werden können, wenn sie auf Aufgaben in der realen Welt übertragen werden, wodurch die Kluft zwischen Simulation und Realität überwunden werden kann.
Häufig gestellte Fragen
- Was ist DrEureka von Nvidia und was ist seine Hauptfunktion? DrEureka von Nvidia ist ein hochmodernes Tool, das große Sprachmodelle verwendet, um die Erstellung von Belohnungsfunktionen und Simulationsparametern zu automatisieren und so einen reibungsloseren Übergang von der Simulation zu realen Roboteraufgaben zu ermöglichen.
- Wie verbessert DrEureka von Nvidia die Robotersimulationen? Durch die Generierung von maßgeschneiderten Belohnungsfunktionen und Domänenrandomisierungsparametern ermöglicht DrEureka den Robotern eine effektivere Anpassung an reale Bedingungen und verbessert so die Genauigkeit und Effizienz von Simulationen, die beim Robotertraining eingesetzt werden.
- Welche einzigartigen Fähigkeiten bietet DrEureka von Nvidia in der Robotik? DrEureka zeichnet sich dadurch aus, dass es automatische, intelligente Anpassungen beim Simulationstraining ermöglicht, was zu effektiveren Anwendungen in der realen Welt führt. Dies reduziert den Zeitaufwand und die Komplexität, die normalerweise mit der manuellen Anpassung von Simulationsumgebungen verbunden sind.
- Kann DrEureka von Nvidia in bestehende Robotersysteme integriert werden? Ja, DrEureka ist so konzipiert, dass es in verschiedene Roboterplattformen integriert werden kann, um deren Fähigkeit zu verbessern, vom simulierten Training zu praktischen, realen Anwendungen überzugehen, ohne dass eine umfangreiche Neukonfiguration erforderlich ist.
- Welche zukünftigen Entwicklungen sind für DrEureka von Nvidia zu erwarten? Zukünftige Verbesserungen für DrEureka könnten die Integration zusätzlicher sensorischer Eingaben und Rückmeldungen über die Ausführung in der realen Welt in die Trainingsschleife umfassen, wodurch die Fähigkeit, Simulationen effektiv in reale Anwendungen zu übertragen, weiter verfeinert wird.







