Last Updated on május 6, 2024 10:30 de. by Laszlo Szabo / NowadAIs | Published on május 6, 2024 by Laszlo Szabo / NowadAIs
Amire nem vagy képes: Robot egyensúlyoz egy labdán az Nvidia DrEureka Sim-to-Real modellel – Fő pontok
- AzNvidia DrEureka bemutatása: Az Nvidia innovatív rendszere, amely nagyméretű nyelvi modelleket használ a robotikában a szimulációtól a valóságig tartó tervezési folyamat egyszerűsítésére.
- A jutalmazási funkciók automatizálása: A DrEureka automatizálja a jutalomfüggvények és a tartományi randomizációs paraméterek létrehozását a zökkenőmentes valós alkalmazás érdekében.
- Kísérletezés és validálás: Sikeresen alkalmazva olyan összetett robotikai feladatokban, mint a négylábúak mozgása és az ügyes manipuláció, robusztus teljesítményt mutatva.
- Továbbfejlesztett biztonsági funkciók: Biztonsági utasításokat épít be a jutalmazás tervezésébe, növelve a robotműveletek valós biztonságát és hatékonyságát.
- Jövőbeni fejlesztések és lehetőségek: Elismeri a valós világból származó visszajelzések és további érzékszervi bemenetek beépítésének szükségességét a szimuláció és a valóság közötti átvitel finomítása érdekében.
Bevezetés – Az Nvidia DrEureka szimulációról a valóságba modellje
A robotika gyorsan fejlődő világában a szimuláció és a valós világ teljesítménye közötti szakadék áthidalása régóta jelentős akadályt jelent. A szimuláció-valós átvitel hagyományos megközelítései gyakran a jutalomfüggvények és a szimulációs paraméterek aprólékos kézi hangolására támaszkodtak, amely folyamat idő- és munkaigényes volt. Az Nvidia kutatólaboratóriumaiban azonban új megoldás jelent meg, DrEureka néven.
A DrEureka egy olyan innovatív rendszer, amely a nagy nyelvi modellek (LLM) erejét kihasználva automatizálja és felgyorsítja a szimulációtól a valósig tartó tervezési folyamatot. A fejlett LLM-ekben rejlő fizikai fogalmak veleszületett megértését kihasználva a DrEureka képes testre szabott jutalomfüggvényeket és tartományi randomizációs paramétereket generálni, lehetővé téve a szimulációban megtanult irányelvek zökkenőmentes átvitelét a való világba.
Most a DrEureka belső működésével ismerkedünk meg, feltárva annak legfontosabb összetevőit, a képességeit igazoló kísérleteket, valamint az autonóm robotika jövőjét érintő mélyreható következményeit.
A szimuláció és a valóság közötti szakadék áthidalása: A kihívás
Hagyományosan a szimulációban megtanult irányelvek valós világba való átültetésének folyamata összetett és nehézkes feladat. A kizárólag virtuális környezetben betanított robotrendszerek gyakran nehezen tudják fenntartani teljesítményüket, amikor a fizikai világban alkalmazzák őket, ez a jelenség a szimuláció és a valóság közötti szakadék néven ismert.
Ez a szakadék a szimulált és a valós környezet közötti eredendő különbségek miatt keletkezik. A szimulációs környezetek, bár rendkívül optimalizáltak a hatékony kiképzéshez, nem biztos, hogy pontosan megragadják a fizikai világ árnyalatait és összetettségét. Az olyan tényezőket, mint a súrlódás, a csillapítás, a merevség és a gravitáció, nehéz lehet tökéletes pontossággal modellezni, ami eltérésekhez vezet a szimulált és a tényleges robot viselkedése között.
A szimuláció és a valóság közötti szakadék áthidalására a kutatók hagyományosan a feladat jutalomfüggvényének, valamint a szimulációs fizikai paramétereknek a kézi tervezésére és hangolására támaszkodtak. Ez a folyamat a robotika, a fizika és az adott feladat mélyreható ismeretét igényli, ami időigényes és munkaigényes feladat. Ennek eredményeképpen a robusztus és megbízható robotrendszerek fejlesztése akadályokba ütközik, ami korlátozza az autonóm technológiák széles körű elterjedését.
Az Nvidia Eureka: A DrEureka előfutára
A DrEureka megjelenése előtt az Nvidia az Eureka platform bevezetésével már jelentős lépéseket tett a szimulációról a valóságra kihívás megoldása terén. Az Eureka egy emberi szintű jutalomtervezési algoritmus, amely automatizálja a robotfeladatok jutalomfüggvényeinek kidolgozását.
Az Eureka platform veszi a feladat és a biztonsági utasításokat, valamint a környezet forráskódját, és létrehoz egy szabványosított jutalmazási funkciót és szabályzatot. Ezeket ezután különböző szimulációs körülmények között teszteljük, hogy a jutalmakra érzékeny fizika priorokat alakítsunk ki. Ez a jutalomérzékeny fizikai prior a DrEureka munkafolyamat további lépéseinek döntő alapjául szolgál.
Az Eureka személyre szabott jutalomfüggvények létrehozására való képessége jelentős előrelépést jelentett a szimuláció-valós átvitel területén, mivel megszüntette a kézi, időigényes jutalomfüggvény-tervezés szükségességét. Az Eureka platform azonban még mindig az ember által tervezett tartomány randomizációs (DR) paraméterekre támaszkodott a szimuláció és a valóság közötti szakadék áthidalásához.
DrEureka: A nyelvi modellek erejének kihasználása
A DrEureka mögött álló kulcsfontosságú innováció abban rejlik, hogy képes hasznosítani a legkorszerűbb LLM-ekbe ágyazott kiterjedt fizikai tudást. Ezek a fejlett nyelvi modellek, mint például a GPT-4, olyan fogalmak mély megértésével rendelkeznek, mint a súrlódás, csillapítás, merevség, gravitáció és más alapvető fizikai elvek. Ennek a veleszületett tudásnak a kihasználásával a DrEureka képes rendkívül hatékony tartományi randomizációs paramétereket generálni, amelyek áthidalják a szimuláció és a valóság közötti szakadékot.
A DrEureka munkafolyamat a feladat és a biztonsági utasítások, valamint a környezet forráskódjának átvételével kezdődik, és elindítja az Eureka jutalomgenerálási folyamatát. Az Eureka egy szabványosított jutalomfüggvényt és szabályzatot állít elő, amelyeket aztán különböző szimulációs körülmények között tesztel, hogy egy jutalomérzékeny fizikai prior kialakuljon.
Ezután az LLM-alapú DrEureka komponens ezt a fizikai előzményt használja fel a konkrét feladathoz és környezethez igazított tartományi randomizációs paraméterek létrehozásához. Az Eureka által generált jutalomfüggvény és az LLM által létrehozott tartományi randomizációs paraméterek szintetizálásával a DrEureka képes olyan irányelvek képzésére, amelyek a valós világbeli bevetésre optimalizáltak.
Kísérleti validálás: Négylábúak mozgása és ügyes manipuláció
A DrEureka képességeinek validálása érdekében a kutatócsoport egy sor kísérletet végzett különböző robotfeladatokra vonatkozóan, bemutatva a rendszer képességét a szimuláció és a valóság közötti szakadék áthidalására.
Négylábúak mozgása
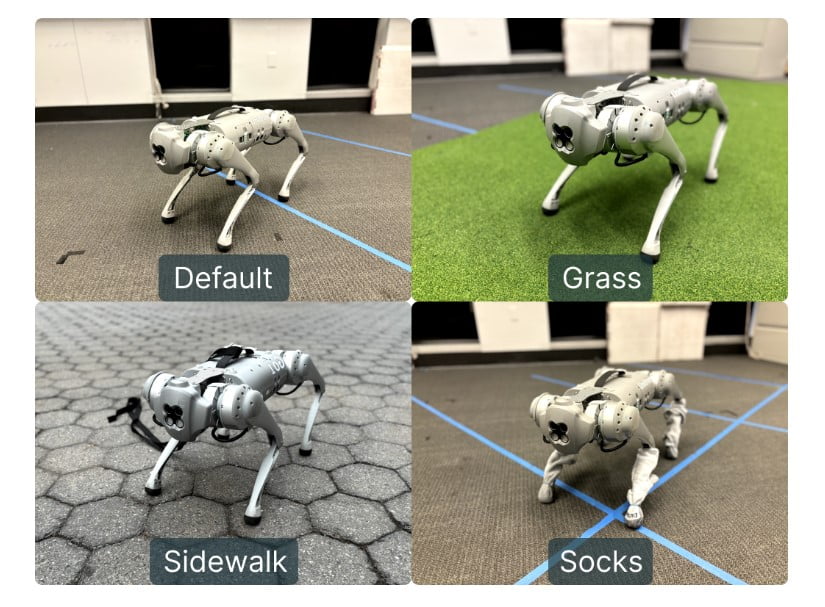
Az egyik legfontosabb vizsgált feladat a négylábúak mozgása volt, ahol a kutatók egy robotkutyát képeztek ki arra, hogy különböző valós terepeken navigáljon. A DrEureka által generált irányelvek figyelemre méltó robusztusságot mutattak, és felülmúlták a kézzel tervezett jutalmazási és tartományi randomizációs konfigurációkkal képzett irányelveket.
Érdekes módon a kutatók azt találták, hogy az LLM-alapú DrEureka nemcsak az ember által tervezett irányelvek teljesítményével volt képes megegyezni, hanem olyan újszerű feladatokat is meg tudott oldani, mint például a négylábú egyensúlyozás és a jógalabda tetején való járás, anélkül, hogy iteratív kézi tervezésre lett volna szükség.
Ügyes manipuláció
A négylábúak mozgása mellett a kutatók a DrEureka képességeit a kézügyes manipuláció területén is értékelték. A rendszer feladata az volt, hogy betanítson egy robotot komplex kockaforgató manőverek végrehajtására, ami általában aprólékos szimulációs hangolást igénylő kihívás.
A DrEureka által generált irányelvek ismét megmutatták alkalmazkodóképességüket, zökkenőmentesen átültetve a megtanult készségeket a szimulált környezetből a fizikai világba. A kutatókat lenyűgözte a rendszer azon képessége, hogy képes kezelni a valós világbeli zavarokat és bizonytalanságokat, és a különböző tesztkörülmények között konzisztens teljesítményt nyújt.
A biztonság és a robusztusság fokozása: Az LLM által vezérelt jutalomtervezés szerepe
A DrEureka rendszer kritikus szempontja, hogy képes biztonsági megfontolásokat beépíteni a jutalomtervezési folyamatba. Az Eureka jutalomgeneráló alprogramjának biztonsági utasításokkal való bővítésével a kutatók biztosították, hogy a kapott jutalomfüggvények nem csak a feladatteljesítményhez, hanem a biztonságos valós világbeli alkalmazáshoz is igazodjanak.
Ez a biztonságtudatos megközelítés különösen fontos, amikor olyan összetett robotrendszerekkel foglalkozunk, amelyek strukturálatlan környezetben működnek. A DrEurekán belül az LLM által vezérelt jutalomtervezés olyan irányelvek létrehozását teszi lehetővé, amelyek mind a feladat teljesítését, mind a robot integritásának megőrzését, mind pedig a környezet biztonságát prioritásként kezelik.
A határok feszegetése: A jövő irányai és korlátai
Bár a DrEureka jelenlegi megvalósítása lenyűgöző képességeket mutatott, a kutatók elismerik, hogy még mindig vannak további javításra és feltárásra váró lehetőségek.
Az egyik lehetséges fejlesztés a valós végrehajtási visszajelzések integrálása az LLM képzési ciklusába. A valós világbeli telepítési hibákból származó adatok további inputként való felhasználásával az LLM-ek az egymást követő iterációk során potenciálisan még hatékonyabban finomhangolhatják a szimulációról a valósra történő átviteli folyamatot.
Emellett a kutatók megjegyzik, hogy a tanulmányban szereplő összes feladat és irányelv kizárólag a robot proprioceptív bemeneteire támaszkodott, a látás vagy más érzékelő modalitások beépítése nélkül. Ezeknek a további érzékszervi bemeneteknek az integrálása tovább javíthatná a politika teljesítményét és gazdagíthatná az LLM visszacsatolási hurkát, ami még robusztusabb és alkalmazkodóképesebb robotrendszerekhez vezethetne.
Mint minden új technológiának, a DrEurekának is vannak bizonyos korlátai. A kutatók elismerik, hogy még mindig előfordul, hogy a robot leesik a jógagolyóról, vagy más valós kihívásokkal találkozik.
Következtetés
Az Nvidia DrEureka úttörő előrelépést jelent az autonóm robotika szimuláció-valós átvitelének területén. A nagyméretű nyelvi modellek erejét kihasználva a kutatók egy olyan átfogó rendszert fejlesztettek ki, amely automatizálja a teljes folyamatot a kezdeti készségek elsajátításától a valós világbeli megvalósításig. A teljes kutatási tanulmányukat itt olvashatja el.
A kísérleti eredmények bemutatták a DrEureka által generált irányelvek figyelemre méltó robusztusságát és alkalmazkodóképességét, amelyek felülmúlták a hagyományos, kézi megközelítéssel képzett irányelveket. A rendszer azon képessége, hogy nem csak az ember által tervezett irányelvek teljesítményével egyezik meg, hanem iteratív tervezés nélkül is képes újszerű feladatokat megoldani, bizonyítja a technológiában rejlő átalakító potenciált.
Ahogy a nyelvi modellek képességei tovább fejlődnek, az autonóm robotika jövője óriási ígéreteket tartogat. A DrEureka a fizikai megértés, a feladatspecifikus jutalomtervezés és az adaptív tartományi randomizáció zökkenőmentes integrációja megnyitja az utat az intelligens, alkalmazkodó és reagáló robotrendszerek új korszaka előtt.
Ennek a technológiának a hatásai messze túlmutatnak a kutatólaboratóriumok határain, mivel a különböző ágazatok iparágai profitálhatnak a szimulációról a valóságra való átvitel terén elért eredményekből. A gyártástól és a logisztikától kezdve az egészségügyön át a katasztrófaelhárításig a DrEureka által működtetett robotok sokoldalúsága az automatizálás új határait tárhatja fel, és átalakíthatja a fizikai világgal való interakcióinkat.
Fogalommeghatározások
- Nvidia: Nagy teljesítményű GPU-jairól, valamint a mesterséges intelligencia és a mélytanulási technológiák terén végzett úttörő munkájáról ismert technológiai vállalat.
- DrEureka: Az Nvidia által kifejlesztett rendszer, amely mesterséges intelligenciát használ a szimuláció és a valóság közötti szakadék áthidalására a robotikában, javítva a szimulált robotikai feladatok valós alkalmazásokba való átültetését.
- Sim-to-real szakadék: A különbség aközött, ahogyan a robotok a feladatokat szimulált környezetben és a valós környezetben végzik.
- Domain Randomization (DR) paraméterek: A szimulációs környezetekben beállított változók és beállítások, amelyek segítségével a modellek jobban általánosíthatók, amikor a valós világbeli feladatokra kerülnek át, segítve ezzel a szim-reális szakadék leküzdését.
Gyakran ismételt kérdések
- Mi az Nvidia DrEureka és mi az elsődleges funkciója? Az Nvidia DrEureka egy olyan élvonalbeli eszköz, amely nagyméretű nyelvi modelleket használ a jutalomfüggvények és szimulációs paraméterek létrehozásának automatizálására, megkönnyítve a szimulációból a valós robotfeladatokba való zökkenőmentesebb átmenetet.
- Hogyan javítja az Nvidia DrEureka a robotszimulációkat? A DrEureka személyre szabott jutalomfüggvények és tartományi randomizációs paraméterek létrehozásával lehetővé teszi, hogy a robotok hatékonyabban alkalmazkodjanak a valós körülményekhez, ezáltal javítva a robotok képzésében használt szimulációk pontosságát és hatékonyságát.
- Milyen egyedülálló képességeket kínál az Nvidia DrEureka a robotikában? A DrEureka azzal tűnik ki, hogy lehetővé teszi az automatizált, intelligens kiigazításokat a szimulációs képzésben, ami hatékonyabb valós alkalmazásokhoz vezet. Ez csökkenti a szimulációs környezetek manuális hangolásával jellemzően járó időt és bonyolultságot.
- Integrálható-e az Nvidia DrEureka a meglévő robotikai rendszerekbe? Igen, a DrEurekát úgy tervezték, hogy integrálható legyen a különböző robotplatformokkal, így javítva azok képességét arra, hogy a szimulált képzésből a gyakorlati, valós alkalmazásokba lépjenek át, anélkül, hogy széleskörű átkonfigurálásra lenne szükség.
- Milyen jövőbeli fejlesztések várhatóak az Nvidia DrEureka számára? A DrEureka jövőbeli fejlesztései közé tartozhat további érzékszervi bemenetek és valós végrehajtási visszajelzések integrálása a képzési hurokba, ami tovább finomítja a szimulációk valós alkalmazásokba való hatékony átmenetének képességét.