Last Updated on mayo 6, 2024 10:35 am by Laszlo Szabo / NowadAIs | Published on mayo 6, 2024 by Laszlo Szabo / NowadAIs
Lo que eres incapaz de hacer: El robot se equilibra sobre una bola con el modelo de simulación a realidad DrEureka de Nvidia – Notas clave
- Introducción a DrEureka de Nvidia: Un innovador sistema de Nvidia que utiliza grandes modelos de lenguaje para agilizar el proceso de diseño sim a real en robótica.
- Automatización de funciones de recompensa: DrEureka automatiza la creación de funciones de recompensa y parámetros de aleatorización de dominios para una aplicación fluida en el mundo real.
- Experimentación y validación: Aplicado con éxito en tareas robóticas complejas como la locomoción cuadrúpeda y la manipulación diestra, demostrando un rendimiento sólido.
- Funciones de seguridad mejoradas: Incorpora instrucciones de seguridad en el diseño de la recompensa, mejorando la seguridad en el mundo real y la eficacia de las operaciones robóticas.
- Mejoras futuras y potencial: Reconoce la necesidad de incorporar información del mundo real y datos sensoriales adicionales para perfeccionar la transferencia de la simulación a la realidad.
Introducción – Modelo de simulación a realidad DrEureka de Nvidia
En el mundo de la robótica, en rápida evolución, el reto de salvar la distancia entre la simulación y el rendimiento en el mundo real ha sido durante mucho tiempo un obstáculo importante. Los métodos tradicionales de transferencia de simulación a realidad solían basarse en un meticuloso ajuste manual de las funciones de recompensa y los parámetros de simulación, un proceso que requería mucho tiempo y trabajo. Sin embargo, en los laboratorios de investigación de Nvidia ha surgido una nueva solución , conocida como DrEureka.
DrEureka es un sistema innovador que aprovecha la potencia de los grandes modelos de lenguaje (LLM ) para automatizar y acelerar el proceso de diseño simulado a real. Al aprovechar la comprensión innata de los conceptos físicos dentro de los LLM avanzados, DrEureka es capaz de generar funciones de recompensa y parámetros de aleatorización de dominios a medida, lo que permite transferir sin problemas las políticas aprendidas en simulación al mundo real.
Ahora nos adentramos en el funcionamiento interno de DrEureka, explorando sus componentes clave, los experimentos que han validado sus capacidades y las profundas implicaciones que tiene para el futuro de la robótica autónoma.
Cerrar la brecha entre simulación y realidad: el reto
Tradicionalmente, el proceso de transferir las políticas aprendidas en simulación al mundo real ha sido una tarea compleja y ardua. Los sistemas robóticos entrenados exclusivamente en entornos virtuales suelen tener dificultades para mantener su rendimiento cuando se despliegan en el mundo físico, un fenómeno conocido como la brecha entre simulación y realidad.
Este desfase se debe a las diferencias inherentes entre los entornos simulado y real. Los entornos de simulación, aunque muy optimizados para una formación eficaz, pueden no captar con precisión los matices y complejidades del mundo físico. Factores como la fricción, la amortiguación, la rigidez y la gravedad pueden ser difíciles de modelar con perfecta precisión, lo que provoca discrepancias entre los comportamientos simulados y reales de los robots.
Para superar el desfase entre simulación y realidad, los investigadores han recurrido tradicionalmente al diseño y ajuste manual de la función de recompensa de la tarea, así como de los parámetros físicos de la simulación. Este proceso requiere un profundo conocimiento de la robótica, la física y la tarea específica en cuestión, lo que lo convierte en una tarea laboriosa y que requiere mucho tiempo. Como resultado, el desarrollo de sistemas robóticos robustos y fiables se ha visto obstaculizado, limitando la adopción generalizada de tecnologías autónomas.
Eureka de Nvidia: El precursor de DrEureka
Antes de la llegada de DrEureka, Nvidia ya había dado pasos significativos para abordar el reto de la simulación a la realidad con la introducción de su plataforma Eureka. Eureka es un algoritmo de diseño de recompensas de nivel humano que automatiza el proceso de creación de funciones de recompensa para tareas robóticas.
La plataforma Eureka toma la tarea y las instrucciones de seguridad, junto con el código fuente del entorno, y genera una función de recompensa y una política estandarizadas. A continuación, se prueban en diversas condiciones de simulación para desarrollar una física previa sensible a las recompensas. Esta física a priori sensible a las recompensas sirve de base fundamental para los pasos posteriores del flujo de trabajo de DrEureka.
La capacidad de Eureka para generar funciones de recompensa a medida supuso un avance significativo en el campo de la transferencia de simulación a realidad, ya que eliminó la necesidad de diseñar manualmente las funciones de recompensa, lo que llevaba mucho tiempo. Sin embargo, la plataforma Eureka seguía dependiendo de parámetros de aleatorización de dominios (DR) diseñados por el ser humano para salvar la distancia entre la simulación y la realidad.
DrEureka: aprovechar la potencia de los modelos lingüísticos
La innovación clave detrás de DrEureka reside en su capacidad para aprovechar el amplio conocimiento físico integrado en los LLM de última generación. Estos modelos de lenguaje avanzado, como GPT-4, están equipados con un profundo conocimiento de conceptos como la fricción, la amortiguación, la rigidez, la gravedad y otros principios físicos fundamentales. Aprovechando este conocimiento innato, DrEureka es capaz de generar parámetros de aleatorización de dominios altamente eficaces que acortan la distancia entre la simulación y la realidad.
El flujo de trabajo de DrEureka comienza tomando las instrucciones de la tarea y de seguridad, junto con el código fuente del entorno, e iniciando el proceso de generación de recompensas de Eureka. Eureka produce una función y una política de recompensa estandarizadas, que luego se prueban en varias condiciones de simulación para desarrollar una física previa consciente de la recompensa.
A continuación, el componente DrEureka basado en LLM aprovecha esta física previa para generar un conjunto de parámetros de aleatorización del dominio que se adaptan a la tarea y el entorno específicos. Al sintetizar la función de recompensa generada por Eureka y los parámetros de aleatorización de dominios creados por LLM, DrEureka es capaz de entrenar políticas optimizadas para su despliegue en el mundo real.
Validación experimental: Locomoción cuadrúpeda y manipulación diestra
Para validar las capacidades de DrEureka, el equipo de investigación llevó a cabo una serie de experimentos con diversas tareas robóticas, demostrando la capacidad del sistema para salvar la brecha entre la simulación y la realidad.
Locomoción cuadrúpeda
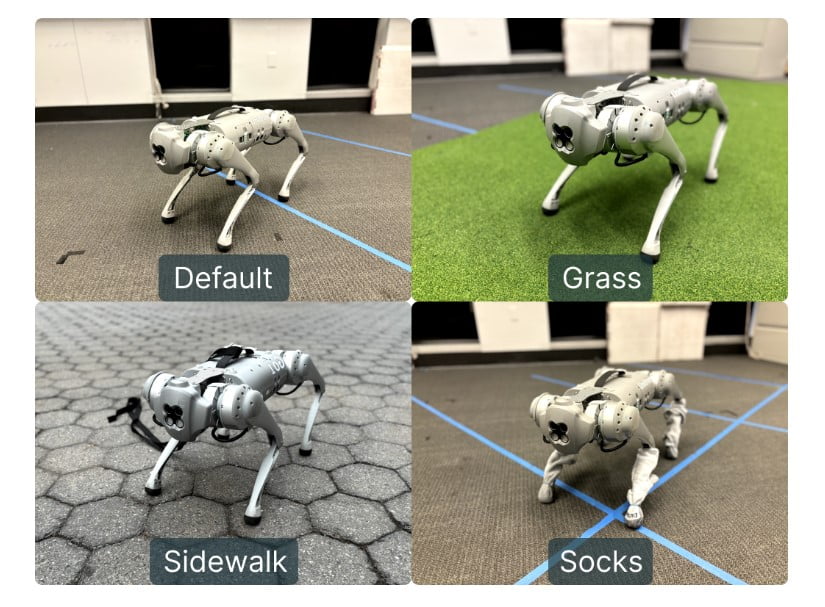
Una de las tareas clave exploradas fue la locomoción de cuadrúpedos, en la que los investigadores entrenaron a un perro robot para navegar por diferentes terrenos del mundo real. Las políticas generadas por DrEureka demostraron una notable robustez, superando a las entrenadas con configuraciones de recompensa y aleatorización de dominios diseñadas manualmente.
Curiosamente, los investigadores descubrieron que DrEureka, con LLM, no sólo era capaz de igualar el rendimiento de las políticas diseñadas por humanos, sino también de resolver tareas novedosas, como equilibrar cuadrúpedos y caminar sobre una pelota de yoga, sin necesidad de un diseño manual iterativo.
Manipulación diestra
Además de la locomoción cuadrúpeda, los investigadores también evaluaron las capacidades de DrEureka en el ámbito de la manipulación diestra. Se encargó al sistema que entrenara a un robot para realizar maniobras complejas de rotación de cubos, un reto que suele requerir un meticuloso ajuste de la simulación.
Una vez más, las políticas generadas por DrEureka demostraron su capacidad de adaptación, transfiriendo sin problemas las habilidades aprendidas del entorno simulado al mundo físico. Los investigadores quedaron impresionados por la capacidad del sistema para hacer frente a las perturbaciones e incertidumbres del mundo real, manteniendo un rendimiento constante en diversas condiciones de prueba.
Mejora de la seguridad y la robustez: El papel del diseño de recompensas basado en LLM
Un aspecto fundamental del sistema DrEureka es su capacidad para incorporar consideraciones de seguridad en el proceso de diseño de recompensas. Al mejorar la subrutina de generación de recompensas de Eureka con instrucciones de seguridad, los investigadores se aseguraron de que las funciones de recompensa resultantes estuvieran adaptadas no sólo al rendimiento de la tarea, sino también a un despliegue seguro en el mundo real.
Este enfoque basado en la seguridad es especialmente importante cuando se trata de sistemas robóticos complejos que operan en entornos desestructurados. El diseño de recompensas basado en LLM de DrEureka permite generar políticas que priorizan tanto la realización de tareas como la preservación de la integridad del robot y la seguridad de su entorno.
Superar los límites: Futuras direcciones y limitaciones
Aunque la implementación actual de DrEureka ha demostrado unas capacidades impresionantes, los investigadores reconocen que aún quedan vías de mejora y exploración.
Una posible mejora es la integración de información sobre la ejecución en el mundo real en el bucle de entrenamiento de los LLM. Mediante el uso de datos de fallos de implementación en el mundo real como entrada adicional, los LLM podrían afinar el proceso de transferencia de simulación a realidad de forma aún más eficaz en iteraciones sucesivas.
Además, los investigadores señalan que todas las tareas y políticas del estudio se basaban únicamente en la información propioceptiva del robot, sin incorporar la visión ni otras modalidades de sensores. La integración de estas entradas sensoriales adicionales podría mejorar aún más el rendimiento de las políticas y enriquecer el bucle de retroalimentación del LLM, dando lugar a sistemas robóticos aún más robustos y adaptables.
Como ocurre con cualquier tecnología nueva, DrEureka también se enfrenta a ciertas limitaciones. Los investigadores reconocen que todavía hay ocasiones en las que el robot se cae de la pelota de yoga o se encuentra con otros retos del mundo real.
Conclusión
DrEureka de Nvidia representa un avance revolucionario en el campo de la transferencia de simulación a realidad para la robótica autónoma. Aprovechando la potencia de los grandes modelos de lenguaje, los investigadores han desarrollado un sistema integral que automatiza todo el proceso, desde la adquisición inicial de habilidades hasta su aplicación en el mundo real. Puede leer el artículo completo aquí.
Los resultados experimentales mostraron la notable robustez y adaptabilidad de las políticas generadas por DrEureka, superando a las entrenadas con métodos manuales tradicionales. La capacidad del sistema no sólo para igualar el rendimiento de las políticas diseñadas por humanos, sino también para resolver nuevas tareas sin diseño iterativo, es un testimonio del potencial transformador de esta tecnología.
A medida que las capacidades de los modelos lingüísticos sigan evolucionando, el futuro de la robótica autónoma será inmensamente prometedor. La perfecta integración en DrEureka de la comprensión física, el diseño de recompensas específicas para cada tarea y la aleatorización adaptativa de dominios allana el camino para una nueva era de sistemas robóticos inteligentes, adaptables y con capacidad de respuesta.
Las implicaciones de esta tecnología van mucho más allá de los confines de los laboratorios de investigación, ya que industrias de diversos sectores pueden beneficiarse de los avances en la transferencia de simulación a realidad. Desde la fabricación y la logística hasta la asistencia sanitaria y la respuesta ante catástrofes, la versatilidad de los robots impulsados por DrEureka podría abrir nuevas fronteras de la automatización y transformar la forma en que interactuamos con el mundo físico.
Definiciones
- Nvidia: Empresa tecnológica conocida por sus potentes GPU y su trabajo pionero en inteligencia artificial y tecnologías de aprendizaje profundo.
- DrEureka: Un sistema desarrollado por Nvidia que utiliza la IA para ayudar a salvar la brecha entre simulación y realidad en robótica, mejorando la traslación de tareas robóticas simuladas a aplicaciones del mundo real.
- Diferenciaentre simulación y realidad: La disparidad entre la forma en que los robots realizan las tareas en entornos simulados y en entornos reales.
- Parámetros de aleatorización de dominios (DR): Variables y parámetros ajustados en entornos de simulación para ayudar a que los modelos se generalicen mejor cuando se trasladan a tareas del mundo real, lo que ayuda a superar la diferencia entre simulación y realidad.
Preguntas más frecuentes
- ¿Qué es DrEureka de Nvidia y cuál es su función principal? DrEureka de Nvidia es una herramienta de vanguardia que utiliza grandes modelos de lenguaje para automatizar la creación de funciones de recompensa y parámetros de simulación, facilitando transiciones más fluidas de la simulación a las tareas robóticas del mundo real.
- ¿Cómo mejora DrEureka de Nvidia las simulaciones robóticas? Al generar funciones de recompensa y parámetros de aleatorización de dominios a medida, DrEureka permite que los robots se adapten con mayor eficacia a las condiciones del mundo real, mejorando así la precisión y la eficacia de las simulaciones utilizadas en el entrenamiento robótico.
- ¿Qué capacidades únicas ofrece DrEureka de Nvidia en robótica? DrEureka destaca por permitir ajustes automatizados e inteligentes en el entrenamiento por simulación, lo que conduce a aplicaciones más eficaces en el mundo real. Esto reduce el tiempo y la complejidad que suele conllevar el ajuste manual de los entornos de simulación.
- ¿DrEureka de Nvidia puede integrarse en los sistemas robóticos existentes? Sí, DrEureka está diseñado para integrarse con varias plataformas robóticas, mejorando su capacidad de transición de la formación simulada a las aplicaciones prácticas del mundo real sin necesidad de una reconfiguración exhaustiva.
- ¿Qué desarrollos futuros se esperan para DrEureka de Nvidia? Entre las futuras mejoras de DrEureka se incluye la integración en su bucle de entrenamiento de entradas sensoriales adicionales y comentarios sobre la ejecución en el mundo real, lo que perfeccionará aún más su capacidad de transición eficaz de las simulaciones a las aplicaciones en el mundo real.